




Uniwersytet Morski w Gdyni słynie z zamiłowania do nowoczesnych rozwiązań. W ostatnim czasie zdecydował stanąć na wysokości zadania, które postawiła przed nim zewnętrzna firma komercyjna prosząc o specjalistyczną ekspertyzę zawodową w zakresie bezpieczeństwa żeglugi realizowanej przez małe nawodne jednostki serwisowe.
Z owocnej kooperacji z biznesem powstały wówczas inicjatywy, które mają potencjał zrewolucjonizować branżę napraw dużych statków, realizowanych przez małe łodzie interwencyjno-nurkowe. Podczas rozmowy z dr hab. inż. kpt. ż. w. Grzegorzem Rutkowskim, prof UMG, przyjrzymy się bliżej tym fascynującym projektom, które powstały w wyniku synergii nauki i biznesu.
Przenośny elastyczny dzwon nurkowy (Batychron) oraz mobilny elektromagnetyczny system cumowniczy MEMS (z ang. Mobile Electromagnetic Mooring System)
Prof. Rutkowski z Uniwersytetu Morskiego w Gdyni, zaczynając ekspertyzę, postawił sobie pytanie, jak zoptymalizować procesy inspekcji czy napraw dużych statków realizowane na otwartym morzu przez małe łodzie interwencyjno-serwisowe. Po dogłębnej analizie potrzeb firmy, narodziła się idea mobilnej bazy nurkowej. W wyniku intensywnych dwóch tygodni pracy Zespołu Prof. Rutkowskiego powstała obszerna dokumentacja, w której zaproponowano szereg innowacyjnych rozwiązań. Pierwszym z nich było zastosowanie przenośnego (bardzo lekkiego, elastycznego) dzwonu nurkowego, opatentowanego już wcześniej przez Uniwersytet Morski w Gdyni. Ten mobilny i elastyczny dzwon, nazywany Batychronem, wykonany z nowoczesnych materiałów, może być składany i zabierany przez nurka pod wodę, by po doczepieniu go do kotwy dennej lub wraku statku, wypełnić czynnikiem oddechowym i używać go jak tradycyjny dzwon nurkowy do walki z dekompresją lub jako miejsce bezpiecznego schronienia pod wodą. Batychron nie tylko ułatwia prace prowadzone przez nurków pod wodą zwiększając ich bezpieczeństwo, ale umożliwia także łatwiejszą komunikację pod wodą, która z wykorzystaniem tradycyjnym aparatów oddechowych trzymanym w ustach nurka nie jest tam możliwa, a ponadto pozwala na planowanie i realizację przystanków dekompresyjnych na różnych głębokościach nurkowania (bez konieczności zużywania tam powietrza z personalnych butli nurkowych), a ponadto umożliwia on także przenoszenie zatopionych obiektów pod wodą pełniąc rolę irodyny lub boi wypornościowej. Zastosowanie elastycznych lekkich dzwonów nurkowych typu Batychron według nowego zgłoszonego do ochrony rozwiązania należącego do uczelni, możliwe jest przy tym na bardzo małych jednostkach nawodnych, w tym również na łodziach typu RIB, które nie posiadają specjalistycznych dźwigów oraz innych urządzeń pokładowych.

Kolejnym pomysłem było zastosowanie innowacyjnej metody cumowania opartej o wynalazek MEMS zgłoszony przez Uniwersytet Morski w Gdyni do Urzędu Patentowego w Polsce i Europie jako mobilny elektromagnetyczny system cumowniczy zwiększający bezpieczeństwo żeglugi oraz redukujący czas i liczbę niezbędnych osób potrzebnych do prowadzenia operacji cumowniczych i manewrowych realizowanych przez małe jednostki interwencyjno-serwisowe operujące przy burcie innych większych statków lub instalacji offshore na otwartym morzu. Rozwiązanie zostało opracowane w ramach pracy przedwdrożeniowej UMG-03 w projekcie Inkubator Innowacyjności 4.0 przez dr hab. inż. kpt. ż. w. Grzegorza Rutkowskiego, prof UMG oraz mgr inż. kpt.ż.w. Pawła Kołakowskiego. Na potencjał systemu MEMS zwróciła już uwagę firma MPL Techma z Chwaszczyna, specjalizująca się w produkcji urządzeń cumowniczych. Porozumienie o współpracy jest już na stole, a perspektywy są obiecujące. Tradycyjne cumowanie z użyciem grubych lin przekazywanych na łodzie serwisowe z innych statków lub instalacji offshore może być teraz zastąpione rewolucyjnym systemem MEMS, który eliminuje zagrożenia wszystkich tych osób zaangażowanych wcześniej w proces cumowniczy tej jednostki zwiększając ich i jej bezpieczeństwo oraz znacząco redukując czas przeprowadzenia takiej operacji. Przycumowanie łodzi wyposażonej w system MEMS do burty dużego statku lub instalacji offshore przebiegać może bowiem w sposób zupełnie autonomiczny, bez konieczności angażowania w ten proces innych osób. Szyper małej łodzi serwisowej może podpłynąć do innego statku lub instalacji ofshore i aktywować tam swoje własne (niezależne) punkty cumowania, które doczepione będą (z wykorzystaniem elektromagnesów) w dogodnych punktach cumowniczych stalowego kadłuba statku lub instalacji offshore, które usytuowane mogą być np. na dziobie i rufie jednostki serwisowanej nieco powyżej wodnicy pływania. Przeniesienie punktów cumowania z pokładu górnego na poziom wodnicy zwiększa stabilność tych jednostek i bezpieczeństwo prowadzonych operacji cumowniczo-manewrowych. Utworzone w ten sposób elektromagnetyczne punkty cumownicze łączone są za pomocą lin ze zintegrowanym systemem kotwiczno-cumowniczym łodzi interwencyjno-serwisowej wyposażonej w systemu MEMS. Połączone w ten sposób liny cumownicze nawijane są lub zwalniane z bębnów wind kotwiczno-cumowniczych sterowanych centralne np. za pomocą manipulatora drążkowego (joysticka) umiejscowionego na mostku nawigacyjnym przy kole sterowym, które obsługuje szyper lub kapitan statku. Przy takim rozwiązaniu mała łódź serwisowa może zatem nie tylko bezpiecznie i samodzielnie zacumować przy burcie innego statku lub instalacji offshore, ale również, w miarę potrzeby przemieszczać się wzdłuż burty tego statku bez konieczności używania do tego celu pędników statkowych. Przy pracach podwodnych z nurkiem pod wodą, wszystkie pędniki muszą być zastopowane i zblokowane, a przemieszczanie łodzi może odbywać się wówczas jedynie z wykorzystaniem zmiennego naciągu lin cumowniczych, które w systemie MEMS mogą być sterowane automatycznie (luzowane lub podciągane) z jednego punktu np. za pomocą joysticka, powodując ruch postępowy takiej łodzi wzdłuż burty zacumowanego statku lub instalacji offshore.
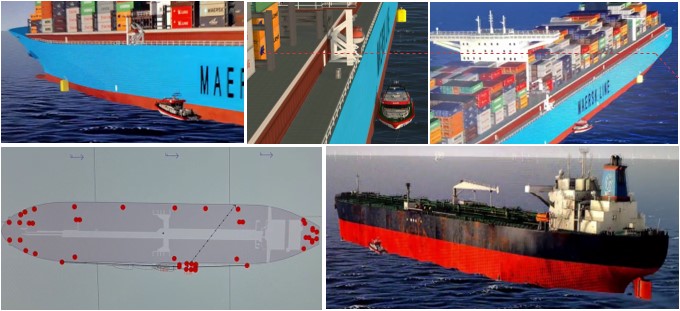
Podsumowując możemy zatem wprowadzić ciekawe novum – samoczynnie przemieszczającą się łódź serwisową (wyposażoną w elektromagnetyczny system cumowniczy MEMS) wzdłuż burty statku serwisowanego, którego kadłub poddawany może być wówczas inspekcji z wykorzystaniem innowacyjnej mobilnej podwodnej bazy nurkowej MUDS Base (z ang. Mobile Underwater Diving Support Base) z podczepionym do niej (w wersji opcjonalnej na potrzeby nurków) elastycznym lekkim dzwonem nurkowym typu Batychron. Jak widać nasze pomysły są realizowane na potrzeby rynku, a nie leżą wyłącznie na półce. Te wszystkie wynalazki nie byłyby jednak możliwe bez środków finansowych dedykowanych na opracowanie, budowę oraz ochronę prawną rozwiązań w ramach projektu „Inkubator Innowacyjności 4.0” (Batychron, MEMS) czy ”Studenckie koła tworzą innowacje” (system MUDS Base) pochodzących z Ministerstwa Nauki i Edukacji oraz ogromnego zaangażowania i wsparcia Centrum Transferu Technologii UMG pod kierunkiem dr inż. Magdaleny Kukowskiej-Kaszuba, które to jako pierwsze dostrzegło ten potencjał komercjalizacyjny naszych rozwiązań. To dowód na to, że lokaty w rozwój naukowy przynoszą realne efekty, które mają szansę zmienić oblicze branży morskiej – informuje prof. Grzegorz Rutkowski. Myślę, że zapotrzebowanie na tego rodzaju sprzęt jest nie tylko lokalne, ale globalne, ponieważ niweluje problemy związane z szeroko rozumianą aktywnością człowieka na wodzie i pod wodą – dodaje prof. Rutkowski. Uniwersytet Morski w Gdyni nie spoczywa na laurach planowane są kolejne inicjatywy, takie jak rozwój mobilnej podwodnej bazy nurkowej MUDS Base oraz budowa pionierskich kotw dennych planowanych obecnie w ramach Naukowego Koła Badań Podwodnych SeaQuest działającego na Uniwersytecie Morskim w Gdyni. Obecnie uczelnia oczekuje na finansowanie, które umożliwi dalszy rozwój tych fascynujących idei i ich komercjalizację.
Martyna Papiernik

Projekty badawcze zrealizowane przez
dr hab. inż. kpt.ż.w. Grzegorza Rutkowskiego, prof. UMG:
Projekt pn. „Wyposażenie Mobilnej Bazy Morskiego Ratowniczego Serwisu Nurkowego MoB MEDS” (Batychron i MEMS) zrealizowane w ramach programu „Inkubator Innowacyjności 4.0”, w ramach projektu pozakonkursowego pn. „Wsparcie zarządzania badaniami naukowymi i komercjalizacja wyników prac B+R w jednostkach naukowych i przedsiębiorstwach w ramach Programu Operacyjnego Inteligentny Rozwój 2014-2020 (Działanie 4.4). Praca przedwdrożeniowa UMG-03 (RWK/II 4.0/7/01/2021).
Projekt pn. „Mobilna Podwodna Baza Wsparcia Nurkowego MUDS Base” (z ang. Mobile Underwater Diving Support Base) zrealizowano w ramach programu finansowanego przez MNiSW pod nazwą „Studenckie koła naukowe tworzą innowacje” (Nr umowy: SKN/SP/535575/2022).
Przyznane patenty i zgłoszenia własności intelektualnej do ochrony:
- Wynalazek pn. „Batychron” Patent PL192265 B1 z dnia 07.02.2002 r., Współtwórcy: Grzegorz Rutkowski, Henryk Korta; uprawniony: Uniwersytet Morski w Gdyni, UPRP
- Wzór użytkowy pn. "Batychron" nr zgłoszenia W.130766. z dn. 5.05.2022 Współtwórcy: Grzegorz Rutkowski, Paweł Kołakowski uprawniony: Uniwersytet Morski w Gdyni:, UPRP
- Wynalazek pn. “Mobilny elektromagnetyczny system cumowniczy dla małych jednostek nawodnych”, nr zgłoszenie P.437572 z dn. 13.04.2021, współtwórcy: Grzegorz Rutkowski, Paweł Kołakowski, uprawniony: Uniwersytet Morski w Gdyni UPRP.
- Wynalazek pn. „Mobile Electromagnetic Mooring System for Service Vessels”, nr zgłoszenia EP22000102 z dn. 12.04.2022, współtwórcy: Grzegorz Rutkowski, Paweł Kołakowski, uprawniony: Uniwersytet Morski w Gdyni, EPO
- Wynalazek pn. „Chwytak statkowy do dokowania małej jednostki pływającej i sposób dokowania małej jednostki pływającej chwytakiem statkowym”, nr zgłoszenia P.446758, współtwórcy: Paweł Kołakowski, Wojciech Koznowski, Andrzej Łebkowski, Grzegorz Rutkowski, uprawniony: Uniwersytet Morski w Gdyni, UPRP
- Wynalazek pn. „Ship gripper for docking a small vessel and method of docking a small vessel with a ship gripper”, nr zgłoszenia: EP 23000164, współtwórcy: Paweł Kołakowski, Wojciech Koznowski, Andrzej Łebkowski, Grzegorz Rutkowski, uprawniony: Uniwersytet Morski w Gdyni, EPO
- Wzór wspólnotowy przemysłowy pn. "Ship Gripper", zgłoszenie nr ZWW 015041537 z dn. 18.11.2023r. współtwórcy: Paweł Kołakowski, Wojciech Koznowski, Andrzej Łebkowski, Grzegorz Rutkowski, uprawniony: Uniwersytet Morski w Gdyni, EUIPO